TB6600HG STEPPER MOTORNI DOLOČI: Specifikacije, funkcije in aplikacije
Katalog
Opis TB6600HG

TB6600HG je PWM Chopper tipa z eno čip bipolarnim sinusoidnim mikrostepskim gonilnikom motorja.Lahko doseže nadzor nad vrtenjem naprej in nazaj skozi 2-fazno, 1-2 fazno, W1-2 faze, 2W1-2 faze in 4W1-2 faze vzbujanja.2-fazni bipolarni stepper motorje poganjajo izključno z nizko vibracijskim, visoko učinkovitim urnim signalom.
Alternative in ustrezniki:
• TB6600FG
• L6258EX
Specifikacije TB6600HG
• Status dela: aktiven
• Embalaža: pladenj
• Paket / primer: HZIP-25
• Proizvajalec: Toshiba
• Operni napajalni tok: 4,2 mA
• Delovna napajalna napetost: 2 V do 5,5 V
• Ocena napetosti obremenitve: 8 V do 42 V
• Število izhodov: 2 izhoda
• PD - odvajanje moči: 40 W
• Slog montaže: skozi luknjo
• Dolžina paketa/širina/višina: 29,3 mm (max)/4,5mm/15,7 mm
• Kategorija izdelka: krmilniki in gonilniki motorja / gibanja / vžiga
Pogoji delovanja TB6600HG
(Ta = -30 ° C do 85 ° C)
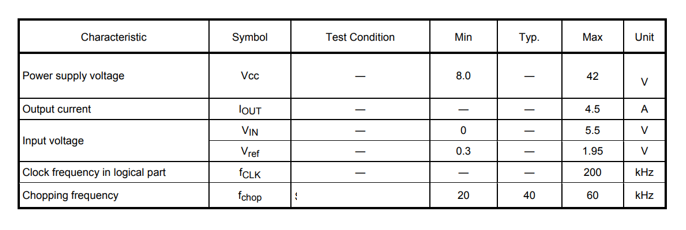
Opomba: Dva sponka VCC je treba programirati isto napetost.Najvišjega toka obratovalnega območja ni mogoče nujno izvesti, odvisno od različnih pogojev, ker je izhodni tok omejen s PD odvajanja moči.Prepričajte se, da se izognete uporabi IC v stanju, zaradi katerega bi temperatura presegla TJ (avg.) = 107 ° C.
Napajalna napetost 42 V in izhodni tok 4,5 A sta največji vrednosti obratovalnega območja.Prosimo, da v tem območju oblikujete vezje z zadostnim razgibanjem, tako da upoštevate variacijo napajanja, zunanji upor in električne značilnosti IC.V primeru preseganja napajalne napetosti 42 V in izhodnega toka 4,5 A, IC ne bo deloval normalno.
Kako povezati TB6600HG s krmilnim sistemom?
Power Connection: Najprej se prepričajte, da zagotovite ustrezen napajanje TB6600HG.Pri napajanju TB6600HG morate običajno povezati dva zatiča: VCC (pozitivno napajanje) in GND (ozemljitvena žica).VCC PIN je odgovoren za zagotavljanje napetosti, potrebne za pogon čipa, medtem ko GND PIN služi kot referenčna raven tal.Zagotoviti moramo, da je napajanje stabilno in ustreza specifikacijam TB6600HG.
Signalna povezava: Glede na specifične potrebe krmilnega sistema moramo kontrolni signal povezati z ustreznim zatičem gonilnega čipa TB6600HG.Ti krmilni signali običajno vključujejo signale za nadzor smernic in koračne impulzne signale itd., Ki so odgovorni za poučevanje, kako motor deluje, vključno s smerjo vrtenja in hitrostjo vrtenja.
Povezava motorja: Pri povezovanju motorja na gonilni čip TB6600HG moramo biti še posebej previdni.Dve žici motorja, običajno rdeče in črne, predstavljata pozitivne in negativne drogove motorja.Rdeča žica se običajno poveže s pozitivnim terminalom motorja, medtem ko se črna žica poveže z negativnim terminalom.
Povezava s povratnimi informacijami (neobvezno): Če se za nadzor povratnih informacij uporablja dajalnik, moramo tudi izhodni signal dajalnika povezati s krmilnim sistemom.To običajno vključuje izhode faze A, faze B in faze Z (če je na voljo).
Ozemljitev: Zagotoviti moramo, da je skupna ozemljitvena žica vse opreme pravilno povezana, da se izognemo motnjam in poškodbam.
Nastavitve inicializacije: Ko je povezava končana, moramo inicializirati nastavitve TB6600HG, da zagotovimo pravilno delo.To lahko vključuje nastavitev tokovnih omejitev, stopnic načine itd.
Funkcije izdelka TB6600HG
• Sprejeti razširjen radiator za dobro odvajanje toplote
• Navodila za nastavitev pododdelka so natisnjena na zadnji strani plošče
• Z izhodno zaščito kratkega stika, brez skrbi
• Sprejeti optično sklopko 6N137, da zagotovite veliko hitrost brez izgube sinhronizacije
• Izhodni tok je močno nastavljiv, da ustreza vašim različnim potrebam
• Z uporabo skupnega vhodnega načina anode obstajata dva vhodna terminala, zaradi česar je ožičenje bolj priročno
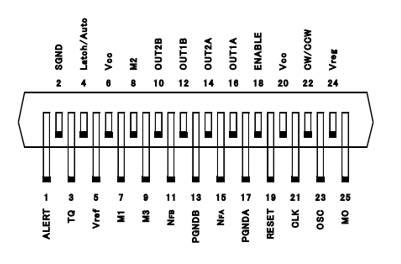
Konfiguracija pin TB6600HG
Opis funkcije TB6600HG
Nastavitve vzbujanja
Način vzbujanja lahko izberete iz naslednjih osmih načinov z uporabo vhodov M1, M2 in M3.Ko se vhodi M1, M2 ali M3 med delovanjem motorja premaknejo, se iz začetnega načina sproži nov način vzbujanja, kar lahko moti kontinuiteto valovne oblike izhodnega toka.
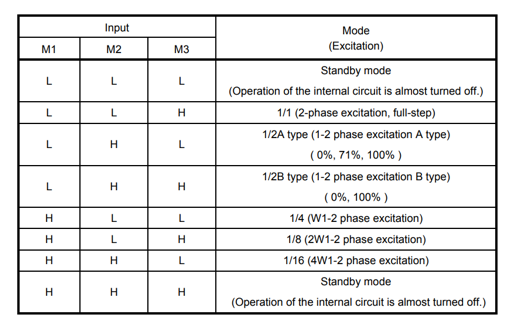
Opomba: Če želite spremeniti vznemirljiv način s spremembo M1, M2 in M3, se prepričajte, da ne nastavite M1 = M2 = M3 = L ali M1 = M2 = M3 = H.
Stanje pripravljenosti
Način delovanja se premakne v način pripravljenosti pod pogojem M1 = M2 = M3 = L ali M1 = M2 = M3 = H. Poraba energije se zmanjša z izklopom vseh operacij, razen zaščite delovanja.V stanju pripravljenosti je izhodni terminal Mo Hz.Način pripravljenosti se sprosti s spreminjanjem stanja M1 = m2 = m3 = l in m1 = m2 = m3 = h v drugo stanje.Vhodni signal po sprostitvi načina pripravljenosti ni sprejet za približno 200 μs.
Način razpada
Polnjenje in odvajanje toka v načinu PWM običajno zahteva približno pet ciklov v OSCM.40 -odstotni način hitrega razpada se sproži tako, da sproži razpad v zadnjih dveh ciklih hitrega razpadanja, razmerje med 40 odstotki pa je dosledno pritrjeno.Razmerje med glavno frekvenco ure (FMCLK), Frekvenco OSCM (FOSCM) in frekvenco PWM (FCHOP) je prikazano na naslednji način:
foscm = 1/20 × fmclk
fchop = 1/100 × fmclk
Ko je ROSC = 51KΩ, glavna ura = 4MHz, OSCM = 200KHz, frekvenca PWM (Fchop) = 40kHz.
Začetni način
Ko se uporabi ponastavitev, so fazni tokovi naslednji.
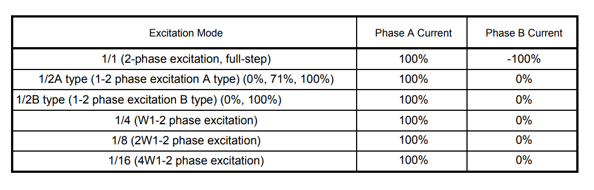
Trenutna smer je opredeljena na naslednji način.
Out1a → out2a: smer naprej
OUT1B → OUT2B: smer naprej
Uporaba TB6600HG
Spodaj je nekaj aplikacij TB6600HG.
• zadnje luči
• Gostoljubje stavbe
• Veliki zaslon na prostem LED
• Alternativa luči skrita
• Industrijske luči z visokim prostorom
• V velikem formatu osvetlitev osvetlitve LED
• Prikaz osvetlitve osvetlitve LED
• Pametni telefoni s kamerami
• Topologije gonilnikov ali stopnic
Pogoste napake in rešitve TB6600HG
Naslednje navaja nekaj pogostih napak o TB6600HG in njihovih rešitvah, ki vam bodo pomagale hitro ukrepati pri naletu na napake in zaščitite normalno delovanje naprave.
Ena okvara: pregrevanje gonilnega čipa
Sam čip TB6600HG je prevroče, verjetno zaradi prekomerne obremenitve ali slabih pogojev odvajanja toplote.
Rešitev: Izboljšajte odvajanje toplote
Na gonilni čip in motor moramo dodati hladilnike ali ventilatorje, da zagotovimo, da lahko med delom v celoti razpršijo toploto.Hkrati moramo ohraniti okolje okoli vozniškega čipa in motorja, da se dobro prezračimo, da se prepreči pregrevanje.
Dva okvara: Motor se vrti v napačno smer
Ko motor prejme pogonski signal, smer vrtenja ni v skladu s pričakovanim, je lahko krmilni signal napačen ali pogonski čip ni pravilno konfiguriran.
Rešitev: Preverite krmilni signal
Previdno moramo preveriti krmilne signale, poslane na TB6600HG, da zagotovimo, da sta signal za nadzor smeri in impulzni signal pravilna.Če se mikrokontroler uporablja za pošiljanje signalov, preverite programsko kodo in konfiguracijo PIN.
Neuspeh tri: Motor se ne vrti
Motor se po prejemu pogonskega signala ne odzove, morda je, da gonilni čip ne deluje pravilno ali obstaja težava s povezavo med motorjem in gonilnim čipom.
Rešitev: Preverite napajanje in povezavo
Poskrbeti moramo, da je napajanje TB6600HG normalno, povezava med motorjem in gonilnikom pa je trdna.Z večmetrom preverimo napetost in tok v vezju, da se prepričamo, da sta v običajnem območju.
Okvara štiri: resno ogrevanje motorja
Motor med delovanjem ustvari prekomerno toploto, kar lahko povzroči prekomerno odvajanje toka ali slabo odvajanje toplote.
Rešitev: Prilagodite trenutno nastavitev
Če motor ustvarja resno toploto, lahko poskušamo zmanjšati izhodni tok gonilnega čipa.S prilagoditvijo trenutnega nastavitvenega zatiča TB6600HG lahko učinkovito omejimo velikost izhodnega toka, kar posledično zmanjša breme na motorju in zagotavlja stabilno in varno delovanje motorja.
Pogosto zastavljena vprašanja [FAQ]
1. Kakšen je območje delovne temperature TB6600HG?
Delovna temperatura TB6600HG sega od -30 ° C do 85 ° C.
2. Kaj je TB6600HG?
TB6600HG je vrsta gonilnika motorja, ki je zasnovan za nadzor nadstropnih motorjev v različnih aplikacijah, kot so CNC stroji, 3D tiskalniki, robotika in sistemi za avtomatizacijo.
3. Katere so ključne značilnosti TB6600HG?
Funkcije TB6600HG vključujejo nastavljiv tok motorja, nastavitve ločljivosti korakov, vgrajeno zaščito pred pregrevanjem in vhode, izolirane z opto, za nadzor signala.