Vodnik za uporabo PIC16F877A za projekti Stepper Motor
Mikrokontroler PIC16F877A se pogosto uporablja v številnih elektronskih projektih, saj ponuja dobro ravnovesje funkcij in enostavnost uporabe.V tem priročniku si bomo natančno ogledali PIC16F877A, ki pokriva vse, od modelov Pinout in CAD do njegove uporabe pri nadzoru motorjev.Ne glede na to, ali gradite preprosto napravo ali zapleten projekt avtomatizacije, vam bo razumevanje, kako povezati in nadzorovati motorje s tem mikrokontrolerjem, pomagalo doseči najboljše rezultate.
Katalog

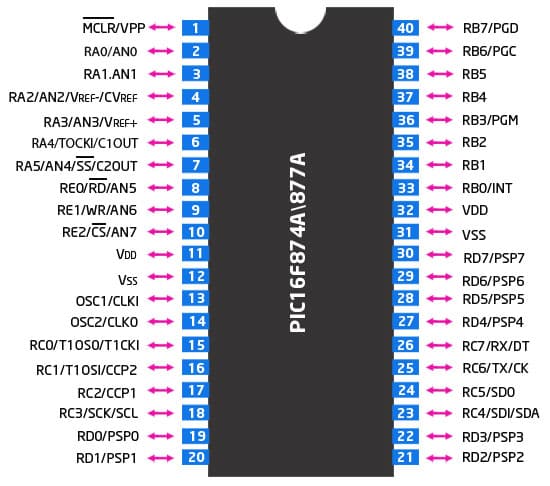
PIC16F877A PIN konfiguracija
CAD modeli za PIC16F877A
Simbol diagrama PIC16F877A
PIC16F877A PCB odtis

3D model
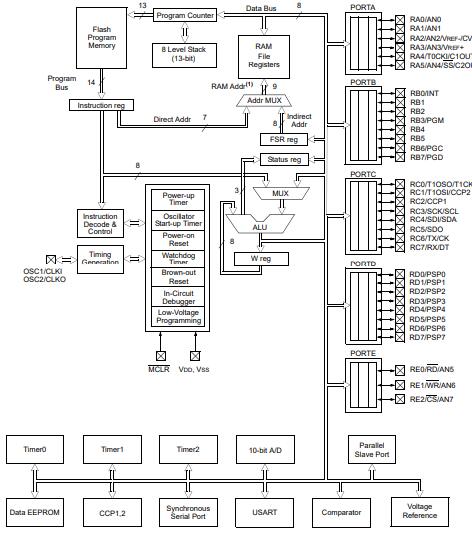
PIC16F877A notranja struktura
Podrobne tehnične specifikacije
| Tip | Parameter |
| Tovarniški čas | 7 tednov |
| Monta | Skozi luknjo |
| Vrsta pritrditve | Skozi luknjo |
| Paket / ohišje | 40-dip (0,600, 15,24 mm) |
| Število zatičev | 40 |
| Pretvorniki podatkov | A/D 8x10b |
| Število I/OS | 33 |
| Časovniki Watchdog | DA |
| Delovna temperatura | -40°C ~ 85°C ta |
| Embalaža | Cev |
| Serija | Slika® 16F |
| Objavljeno | 1997 |
| Koda JESD-609 | E3 |
| PBFREE koda | DA |
| Status dela | Aktivno |
| Raven občutljivosti vlage (MSL) | 1 (neomejeno) |
| Število odpovedi | 40 |
| ECCN koda | EAR99 |
| Končni zaključek | Matte kositer (sn) - žarjeno |
| Dodatna funkcija | Deluje pri 4V minimalni oskrbi |
| Položaj terminala | Dvojno |
| Napajalna napetost | 5V |
| Frekvenca | 20MHz |
| Osnovna številka dela | PIC16F877A |
| Število pin | 40 |
| Dovodna napetost-max (vSUP) | 5.5V |
| Napajanje | 5V |
| Napajalna napetost (vSUP) | 4.5V |
| Vmesnik | I2C, SPI, SSP, UART, USART |
| Velikost pomnilnika | 14KB |
| Vrsta oscilatorja | Zunanji |
| Nominalni dovodni tok | 1,6mA |
| Velikost RAM -a | 368 x 8 |
| Napetost - Dobava (VCC/VDD) | 4V ~ 5,5V |
| UPS/UCS/periferni tip ICS | Mikrokontroler, RISC |
| OSRNI procesor | Slika |
| Periferne naprave | Brown-Out Detect/Reset, Por, PWM, WDT |
| Vrsta pomnilnika programa | Flash |
| Velikost jedra | 8-bit |
| Velikost programa pomnilnika | 14KB (8K x 14) |
| Povezljivost | I2C, SPI, UART/USART |
| Velikost bit | 8 |
| Čas dostopa | 20 µs |
| Ima ADC | DA |
| DMA kanali | Ne |
| Širina podatkovnega vodila | 8b |
| Število časovnikov/števcev | 3 |
| Širina naslova avtobusa | 8b |
| Gostota | 112 kb |
| Velikost EEPROM | 256 x 8 |
| Družina CPU | Slika |
| Število kanalov ADC | 8 |
| Število kanalov PWM | 2 |
| Število i2c kanalov | 1 |
| Višina | 4,06 mm |
| Dolžina | 52,45 mm |
| Širina | 14,22 mm |
| Doseči SVHC | Brez SVHC |
| Utrjevanje sevanja | Ne |
| Status ROHS | ROHS3 skladen |
| Brez vodi | Brez vodi |
Razumevanje koračnih motorjev
Stepper motor je vrsta elektromotorja, ki se premika v določenih korakih in ne v neprekinjenem gibanju, kot so tradicionalni motorji.Ti premiki po korakih se merijo v stopinjah, ki se lahko razlikujejo glede na aplikacijo.
Stepper Motors lahko delujejo v različnih načinih: valovni pogon, polni pogon in pol pogona.Vsak način nadzoruje, kako se motorične faze energizirajo, kar vpliva na njegovo delovanje in ga naredi za različne uporabe.
V načinu valovnega pogona se hkrati poganja samo ena faza motorja.Ta preprost način nadzora je uporaben za situacije, kjer je učinkovitost moči prednostna pri navoru, na primer pri osnovnih nalogah avtomatizacije, kjer je potreben minimalni začetni tok.
Popolni način pogona hkrati napaja dve fazi.To ima za posledico večji izhod na navoru, saj dve tuljavi delujeta skupaj, zato je idealna za aplikacije, kjer sta potrebna natančnost in moč, na primer v robotiki in strojih CNC.
Polovični pogonski način združuje lastnosti valovnega in polnega pogona, tako da izmenično spodbudi eno fazo in dve fazi.Ta pristop zagotavlja manjše velikosti korakov in učinkovito podvoji ločljivost motorja.Polovični pogon je najbolj primeren za aplikacije, kot sta 3D tiskanje in fina instrumentacija, kjer sta gladko gibanje in natančno pozicioniranje bistvenega pomena.
Pri izbiri koračnega motorja za določeno uporabo razmislite o delovnem okolju.Za naloge z visoko natančnostjo priporočamo pol pogonskega načina, da se zagotovi nemoteni prehodi in zmanjšane vibracije.Za projekte, osredotočene na prihranke energije, je način valovnega pogona morda bolj primeren.
Izbira pravega načina zahteva uravnoteženje dejavnikov, kot so navor, hitrost in kompleksnost sistema.Izbira pravilnega načina lahko znatno vpliva na zmogljivost motorja in splošno učinkovitost vašega sistema.
Povezava steppernega motorja s PIC16F877A
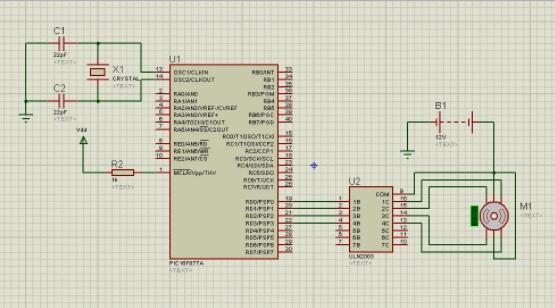
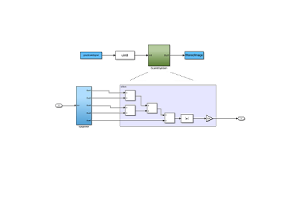
Za povezovanje koračnega motorja z a PIC16F877A Mikrokontroler, lahko uporabite matriko tranzistorja ULN2003.To integrirano vezje, zasnovano za motorje z visokimi torbicami, vsebuje sedem parov Darlington.Spodnji portd biti mikrokontrolerja so povezani z vhodnimi zatiči (1b, 2b, 3b, 4b) ULN2003, medtem ko se njegovi izhodni zatiči (1c, 2c, 3c, 4c) povezujejo z zatiči stopnic motorja.Skupni zatiči motorja in COM PIN ULN2003 so povezani z 12V napajalnikom.
Stepper Motors se običajno uporabljajo za aplikacije, ki zahtevajo natančen nadzor gibanja.Digitalne impulze pretvorijo v mehansko vrtenje, zaradi česar so idealni za naprave, kot so CNC stroji in 3D tiskalniki, kjer je treba skrbno regulirati položaj in hitrost.
ULN2003 ima ključno vlogo pri nadzoru stepper Motors zaradi svoje sposobnosti ravnanja z visokim tokom in njenega enostavnega povezovanja z mikrokontrolerji.Ko so povezani s PIC16F877A, se spodnji portd bitovi uporabljajo za krmiljenje koračnega motorja.Ta konfiguracija zagotavlja natančen nadzor korakov in zagotavlja natančno gibanje in pozicioniranje.
Uporaba ULN2003 v nastavitvah motorja je zelo zanesljiva v aplikacijah v resničnem svetu.Pomaga zmanjšati težave, kot so zgrešeni koraki ali napačno pozicioniranje, kar izboljšuje splošno uspešnost.Redno vzdrževanje in kalibracija, ki temelji na podatkih o uporabi, lahko še dodatno optimizirajo motorično funkcijo, kar zagotavlja dolgoročno stabilnost in natančno delovanje.
Prilagoditev hitrosti koraka motorja
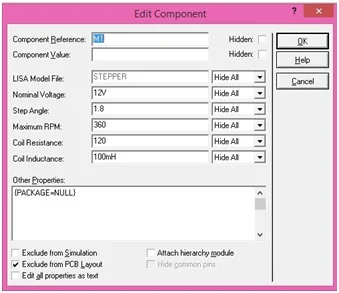
Stepper Motor Speed je mogoče natančno spreminjati s programsko opremo za simulacijo Proteusa.Z dostopom do nastavitev motorja prek "Uredi lastnosti" prilagoditve parametrov, kot so število korakov in kota koraka.Na primer, 200-stopenjski motor razdeli polno vrtenje (360 °) na 200 korakov, zaradi česar je vsak korak 1,8 °.Spreminjanje teh nastavitev v Proteusu se bo med simulacijo dinamično odražalo.
V praksi so stepper motorji pogosto uporabljeni v panogah, kjer je natančen nadzor nad gibanjem ključnega pomena, na primer v strojih CNC in robotika.Prilagoditev kota koraka in število korakov natančno prilagodi motor, da doseže natančno gibanje, potrebno za določene naloge.
Sprememba parametrov motoričnega koraka vpliva na lastnosti zmogljivosti, kot sta navor in ločljivost.Na primer, povečanje števila korakov na splošno poveča resolucijo, vendar lahko vpliva na navor in odzivni čas.Razumevanje teh kompromisov s simulacijo pomaga pri sprejemanju premišljenih odločitev.
Niansirana perspektiva razkriva, da iterativne prilagoditve, ki jim sledijo praktična preskušanja, vodijo do močnejše zasnove motorja.Zagotavljanje, da so digitalne simulacije tesno zrcalijo rezultate resničnega sveta, je ključnega pomena.Odtenke konfiguriranja koračnega motorja so resnično v ravnovesju med teoretično natančnostjo in praktično izvedljivostjo.
Programiranje koračnega motorja s PIC16F877A
Ta razdelek zajema, kako programirati koračni motor s pomočjo mikrokontrolerja PIC16F877A, ki pojasnjuje različne načine vožnje in zagotavlja praktične napotke za učinkovito izvajanje.
Tu je osnovna koda za prikaz krmiljenja motorja Stepper z uporabo celotnega pogona:
void main ()
{
TRISD = 0B00000000;// nastavite Portd kot izhod
Portd = 0B11111111;// inicializirajte Portd
naredi
{
Portd = 0B00000011;// Energizirajte dve fazi hkrati
Zamuda_ms (500);// 0,5-sekundna zamuda
Portd = 0B00000110;
Zamuda_ms (500);
Portd = 0B00001100;
Zamuda_ms (500);
Portd = 0B00001001;
Zamuda_ms (500);
} medtem ko (1);// zanko v nedogled
}
V tej kodi je Portd PIC16F87A konfiguriran kot izhodna vrata za nadzor steppernega motorja prek gonilnika ULN2003.Zaporedje ukazov naenkrat spodbudi dve fazi koračnega motorja, kar je značilno za način polnega pogona.Ta način drži rotor v fiksnem položaju z največjim navorom, vendar običajno porabi več moči.
Način celotnega pogona ni edini način za nadzor nad Stepper Motors.Načini valovnega pogona in pol pogona zagotavljajo alternative na podlagi posebnih zahtev.Valovni pogon napaja le eno fazo naenkrat, kar zmanjšuje porabo energije, vendar ima za posledico manjši navor.Polovica vožnje se spreminja med eno in dvema fazama, kar ponuja večjo ločljivost in gladko gibanje.
Pri programiranju Stepper Motors izberite način vožnje, ki najbolje ustreza vašim potrebam, naj bo to natančno pozicioniranje, učinkovitost moči ali največji navor.
Praktične uporabe Stepper Motors
Stepper Motors se v mnogih panogah pogosto uporabljajo zaradi svoje sposobnosti natančnega nadzora in zanesljivih zmogljivosti.Zaradi njihove vsestranskosti so primerne za vse, od avtomobilov in gospodinjskih aparatov do industrijskih strojev in medicinskih pripomočkov.
V avtomobilskem svetu igrajo Stepper Motors ključno vlogo pri nadzoru sistemov, kot so plin, žarometi in klimatska naprava.Te komponente pomagajo natančno prilagoditi in poskrbijo, da vozila nemoteno in učinkovito.Medtem v pisarni opremi, kot so tiskalniki in fotokopirni, Stepper Motors obravnavajo naloge, kot sta hranjenje papirja in namestitev črnila.Ta natančnost zagotavlja dosledno kakovost tiskanja in gladko delovanje sčasoma.
Doma se aparati, kot so pralni stroji in pomivalni stroji, za zatiranje pretoka vode in vrtenja bobna zanašajo na stepper motorje, s čimer zagotavljajo, da vse deluje brezhibno.V industrijskih nastavitvah so Stepper Motors ključni za upravljanje CNC strojev in robotskih rok, kjer zagotavljajo natančne gibe, potrebne za visoko natančno proizvodnjo.
Varnostni sistemi imajo koristi tudi od zanesljivega gibanja Stepper Motors.V napravah, kot so nadzorne kamere in avtomatizirane ključavnice, Stepper Motors omogočajo gladko in natančno pozicioniranje, kar je bistvenega pomena za učinkovito spremljanje in varnost.V zdravstvenem varstvu se Stepper Motors uporabljajo v medicinskih napravah, kot so infuzijske črpalke in oprema za slikanje, kjer ponujajo natančen nadzor, potreben za varno in natančno delovanje.
Ko se tehnologija še naprej razvija, naj bi Stepper Motors našli še več aplikacij na nastajajočih področjih, kot so robotika in avtonomna vozila.Njihov nadaljnji razvoj bo verjetno privedel do še večje natančnosti in učinkovitosti, kar bo povečalo svojo vlogo v različnih panogah.
Primerljivi deli mikrokontrolerja
| Številka dela | PIC16F877A-I/P. | PIC16F77-I/P. | PIC16F74-I/P. | PIC16F777-I/P. |
| Proizvajalec | Tehnologija mikročipov | Tehnologija mikročipov | Tehnologija mikročipov | Tehnologija mikročipov |
| Paket / ohišje | 40-dip (0,600, 15,24 mm) | 40-dip (0,600, 15,24 mm) | 40-dip (0,600, 15,24 mm) | 40-dip (0,600, 15,24 mm) |
| Število zatičev | 40 | 40 | 40 | 40 |
| Širina podatkovnega vodila | 8 b | 8 b | 8 b | 8 b |
| Število V/I. | 33 | 33 | 33 | 36 |
| Vmesnik | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, UART, USART |
| Velikost pomnilnika | 14 kb | 7 kb | 14 kb | 14 kb |
| Napajalna napetost | 5 v | 5 v | 5 v | 5 v |
| Periferne naprave | Brown-Out Detect/Reset, Por, PWM, WDT | Brown-Out Detect/Reset, Por, PWM, WDT | Brown-Out Detect/Reset, Por, PWM, WDT | Brown-Out Detect/Reset, Por, PWM, WDT |
| Pogled primerjaj | PIC16F877A-I/P. Vs PIC16F77-I/P. | PIC16F877A-I/P. Vs PIC16F77-I/P. | PIC16F877A-I/P. Vs PIC16F74-I/P. | PIC16F877A-I/P. Vs PIC16F777-I/P. |
Pogosto zastavljena vprašanja [FAQ]
1. Kaj uporablja korak motorja za ustvarjanje mehanskega gibanja?
Stepper motor ustvarja mehansko gibanje z uporabo električnih impulzov.
2. Kaj počne Stepper Motor?
Stepper motor se premika v diskretnih korakih.
3. Kako se merijo stepper motorji?
Stepper Motors se merijo v stopinjah.
4. Koliko korakov poteka koračni motor?
Stepper motor se premakne korak za korak.
5. Koliko načinov vzbujanja ima stepper motor?
Stepper motor ima tri načine vzbujanja.
6. Kakšen je najpreprostejši način za povezovanje koračnega motorja?
Najpreprostejši način je, da ga povežete z mikrokontrolerjem PIC16F877A.
7. Koliko vhodnih zatičev ULN2003 je povezanih z najnižjimi pomembnimi bitmi portd mikrokontrolerja?
Štirje vhodni zatiči so priključeni na najnižje pomembne bite portd mikrokontrolerja
O nas
ALLELCO LIMITED
Preberi več
Hitro povpraševanje
Prosimo, pošljite poizvedbo, takoj bomo odgovorili.
Zakaj za svoj projekt izbrati pomnilniški čip Adesto RM25C64DS-LTAI-B?
na 2024/10/10
PC817 OPTOOCOUPLER: Funkcionalnost in sodobne aplikacije
na 2024/10/10
Priljubljene objave
-

Kompleksni nastavitveni računalniki: Kako so spremenili računalništvo?
na 8000/04/18 147749
-

USB-C pinout in funkcije
na 2000/04/18 111898
-
Uporaba Xilinx Unified Simulacijske primitive: Obsežen vodnik za oblikovanje in simulacijo FPGA
na 1600/04/18 111349
-
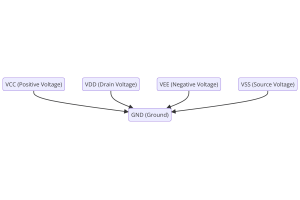
Napajalne napetosti v elektroniki: pomen VCC, VDD, VEE, VSS in GND
na 0400/04/18 83713
-

Vodnik priključkov RJ45: pinout, ožičenje, vrste kablov in uporabe
na 1970/01/1 79502
-

Ultimate Guide za žičnice barvnih kod v sodobnih električnih sistemih
Način, kako naši električni sistemi uporabljajo barve, ni samo za videz.Vsaka barva žice zdaj označuje določeno funkcijo, kar olajša pravilno prepoznavanje in ravnanje z električnimi komponentami m...na 1970/01/1 66866
-

Faktor kakovosti (q): enačbe in aplikacije
Faktor kakovosti ali "Q" je pomemben pri preverjanju, kako dobro induktorji in resonatorji delujejo v elektronskih sistemih, ki uporabljajo radijske frekvence (RF).'Q' meri, kako dobro vezje minimi...na 1970/01/1 63004
-

Vodnik za čiščenje ventila: funkcija, simptomi, testiranje in zamenjava za optimalno delovanje motorja
Čistilni ventil je ključni del sistema avtomobila, ki pomaga ohranjati čist zrak z upravljanjem hlapov goriva, preden lahko pobegnejo v ozračje.To ne samo pomaga okolju z zmanjšanjem onesnaževanja,...na 1970/01/1 62934
-
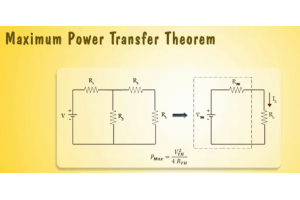
Doseganje največjih zmogljivosti z največjim teoremom o prenosu energije
Teorem največjega prenosa moči pojasnjuje, kako energija iz vira, na primer baterija ali generator, teče v povezano obremenitev.Prikaže natančen pogoj, kjer obremenitev prejme največ moči.Ta članek...na 1970/01/1 54073
-

A23 Specifikacije baterije in združljivost
Akumulator A23 je majhna baterija v obliki valja z visoko napetostjo.Imenovan tudi 23A, 23AE ali MN21, deluje pri 12 voltih in veliko višji od baterij AA ali AAA.Njegova posebna zasnova je...na 1970/01/1 52087
Vroča številka dela
-

XC3S50A-4VQG100C
AMD
IC FPGA 68 I/O 100VQFP
SI1102-A-GM
Silicon Labs
SENSOR OPT REFLECTIVE 50CM 8WDFN
TCN4-13+
Mini-Circuits
1:4 LTCC TRANSFORMER, 650 - 1250
VF30100S-E3/4W
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 100V 30A ITO220AB
GRM033R70J103KA01D
Murata Electronics
CAP CER 10000PF 6.3V X7R 0201
QMK212B7102MDHT
Taiyo Yuden
CAP CER 1000PF 250V X7R 0805
M82351G-12
MACOM Technology Solutions
ACCESS VOICE PROCESSOR
74LV132D,112
Nexperia USA Inc.
IC GATE NAND SCHMIT 4CH 2IN 14SO
AH1801-FJG-7
Diodes Incorporated
MAG SWITCH OMNIPOLAR DFN2020B-3
DG412DY-T1-E3
Vishay Siliconix
IC SWITCH SPST-NOX4 35OHM 16SOIC
PIC16F876A-I/SO
Microchip Technology
IC MCU 8BIT 14KB FLASH 28SOIC
LXA08FP600
Power Integrations
DIODE GP 600V 8A TO220 FULL PACK
FM25V20A-DG
Infineon Technologies
IC FRAM 2MBIT SPI 40MHZ 8DFN
CY7C1011CV33-10ZXC
Cypress Semiconductor Corp
IC SRAM 2MBIT PARALLEL 32TSOP II
04023C221KAT2A
KYOCERA AVX
CAP CER 220PF 25V X7R 0402
RO3101A
Murata Electronics
SAW RES 433.9200MHZ SMD
XRD9818ACGTR
MaxLinear, Inc.
IC AFE 3 CHAN 16BIT 28TSSOP
CL21F104ZBANNNC
Samsung Electro-Mechanics
CAP CER 0.1UF 50V Y5V 0805 -

BZT52-B16_R1_00001
Panjit International Inc.
SOD-123, ZENER
P0300ECL
Littelfuse Inc.
THYRISTOR 25V 400A TO226-2
TPS73615DBVTG4
Texas Instruments
IC REG LINEAR 1.5V 400MA SOT23-5
SN74AXC4T774BQBR
Texas Instruments
IC TRANSCEIVER HALF 4/4 16WQFN
170M5954
Eaton - Bussmann Electrical Division
FUSE SQUARE 350A 1KVAC RECT
CC0805KRX7R9BB682
YAGEO
CAP CER 6800PF 50V X7R 0805
SRP7028A-6R8M
Bourns Inc.
FIXED IND 6.8UH 4.5A 60 MOHM SMD
SMAJ150CA
Taiwan Semiconductor Corporation
TVS DIODE 150VWM 243VC DO214AC
PE-68675
Pulse Electronics
IC CHIP
MAX14890EATJ+
Analog Devices Inc./Maxim Integrated
IC RECEIVER 0/4 32TQFN
TFZGTR20B
Rohm Semiconductor
DIODE ZENER 20V 500MW TUMD2
1N5406-E3/73
Vishay General Semiconductor - Diodes Division
DIODE GEN PURP 600V 3A DO201AD
ME501610
Powerex Inc.
BRIDGE RECT 3P 1.6KV 100A MODULE
GRM1555C2A5R8DA01D
Murata Electronics
CAP CER 5.8PF 100V C0G/NP0 0402
MRF8S19140HSR3
NXP USA Inc.
FET RF 65V 1.96GHZ NI780HS
TN2130K1-G
Microchip Technology
MOSFET N-CH 300V 85MA TO236AB
ADL5519ACPZ-R7
Analog Devices Inc.
IC AMP LOG DETECT CTRLR 32LFCSP
SP3222ECT-L
MaxLinear, Inc.
IC TRANSCEIVER FULL 2/2 18SOIC -
502AT-2
Semitec USA Corp
NTC THERMISTORS 5KOHM 1%
NFM18CC101R1C3D
Murata Electronics
CAP FEEDTHRU 100PF 20% 16V 0603
PS2562L-1-F3-A
Renesas Electronics America Inc
OPTOISOLATOR 5KV DARL 4SMD
502494-0370
Affinity Medical Technologies - a Molex company
2.0 W/B SGL R/ARECASSY3CKTEMBSTP
C1206C223K5RACTU
KEMET
CAP CER 0.022UF 50V X7R 1206
NIS5102QP2HT1G
onsemi
IC HOT SWAP CTRLR GP 12PLLP
VI-J62-MY
Vicor Corporation
DC DC CONVERTER 15V 50W
ADR441ARMZ-REEL7
Analog Devices Inc.
IC VREF SERIES 0.12% 8MSOP
MIC5200-5.0BS
Microchip Technology
IC REG LINEAR 5V 100MA SOT223-3
TAS3251DKQR
Texas Instruments
IC AMP D MONO/STER 350W 56HSSOP
GRM1886T1H360JD01D
Murata Electronics
CAP CER 36PF 50V T2H 0603
TZM5249B-GS08
Vishay General Semiconductor - Diodes Division
DIODE ZENER 19V 500MW SOD80
LM2575-5.0YWM
Microchip Technology
IC REG BUCK 5V 1A 24SOIC
RT0402BRE075K6L
YAGEO
RES SMD 5.6K OHM 0.1% 1/16W 0402
C0603JB1A104M030BC
TDK Corporation
CAP CER 0.1UF 10V JB 0201
CSD17571Q2
Texas Instruments
MOSFET N-CH 30V 22A 6SON
P4SMA13CA
Bourns Inc.
TVS DIODE 11.1VWM 18.2VC DO214AC
AR0144ATSM20XUEA0-DPBR
onsemi
1MP 1/4 CIS SO