Uvod v krmilne sisteme: delovanje, vrste in aplikacije
Nadzorne sisteme uporabljate vedno, ko stroj samodejno ohranja enakomerno vrednost, kot so temperatura, hitrost ali nivo.Ta članek pojasnjuje, kaj je nadzorni sistem, kako njegovi deli delujejo skupaj in kako povratne informacije ohranjajo izhod pravilen.Videli boste tudi glavne vrste sistemov in kako se obnašajo med delovanjem.Vključene so običajne uporabe, prednosti in omejitve.Katalog
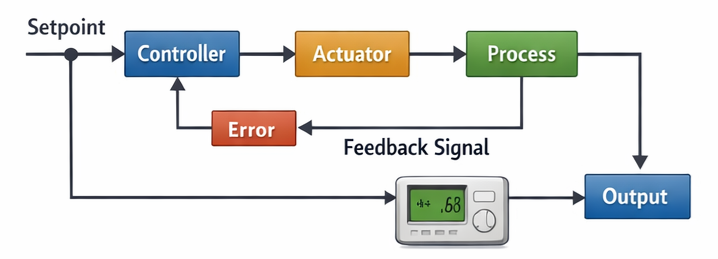
Slika 1. Primer krmilnega sistema
Kaj je nadzorni sistem?
Krmilni sistem je sistem, ki ohranja izmerjeno vrednost blizu želene ciljne vrednosti.Njegov namen je samodejno prilagajanje procesa, tako da rezultat ostane pravilen, tudi ko se pogoji spremenijo.Na primer, sobni termostat vzdržuje temperaturo blizu nastavljene ravni, avtomobilski tempomat pa ohranja vozilo pri izbrani hitrosti.Regulator nivoja rezervoarja za vodo tudi vzdržuje višino vode na izbrani točki.Preprosto povedano, nadzorni sistem nenehno preverja in popravlja spremenljivko, da ustreza zahtevani vrednosti.
Osnovni elementi krmilnega sistema
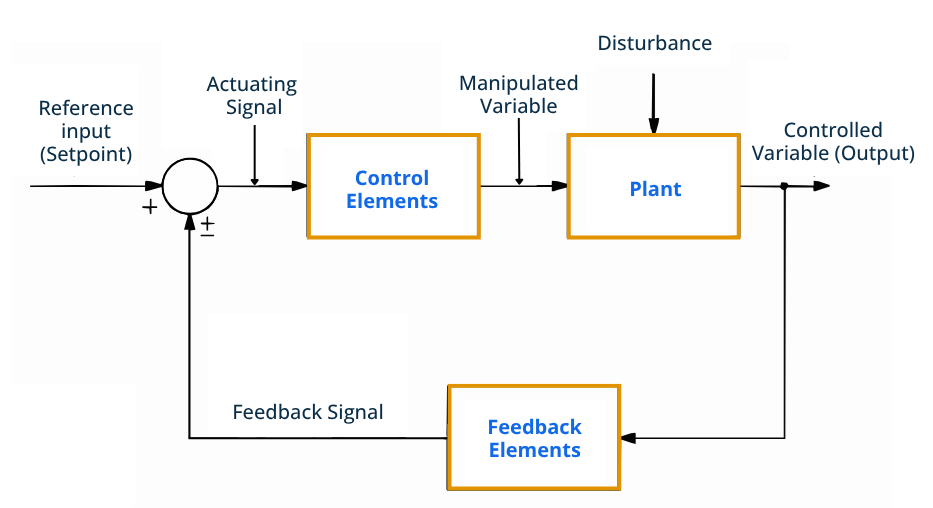
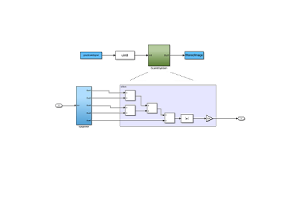
Slika 2. Blok diagram krmilnega sistema
Krmilni sistem je sestavljen iz več standardnih delov, od katerih vsak opravlja določeno nalogo.
• Referenčni vhod (nastavljena točka)
To je želena vrednost, ki jo sistem poskuša vzdrževati.Predstavlja izbrano ciljno stanje.Sistem vedno primerja dejansko vrednost s to referenco.
• Aktivacijski signal
To je signal, ki nastane po primerjavi želenih in dejanskih vrednosti.Predstavlja, koliko prilagoditev je potrebno.Signal pripravi sistem na popravek.
• Nadzorni elementi
Ti deli skrbijo za proces odločanja.Na podlagi prejetega signala določijo korektivni ukrep.Rezultat te stopnje pripravi postopek za prilagoditev.
• Manipulirana spremenljivka
To je nastavljiva količina, poslana v proces.Spreminjanje te vrednosti vpliva na končni rezultat.To je spremenljivka, ki jo lahko sistem neposredno spreminja.
• Rastlina
Obrat je proces, ki ga nadzorujemo.Izdela končno izhodno vrednost.Cilj sistema je ohraniti ta rezultat na želeni ravni.
• Motnja
To je neželena sprememba, ki vpliva na proces.Izhod lahko potisne stran od želene vrednosti.Sistem ga mora nadomestiti.
• Nadzorovana spremenljivka (izhod)
To je dejanski izmerjeni rezultat postopka.Prikazuje trenutno stanje sistema.Cilj je, da ostane enak referenčnemu vnosu.
• Elementi povratne informacije
Ti merijo izhod in pošiljajo informacije nazaj v preverjanje.Sistemu zagotavljajo trenutno stanje.To omogoča določitev popravka.
• Povratni signal
To je vrnjena informacija o izhodni vrednosti.Predstavlja stanje procesa.Sistem ga uporablja za primerjavo.
Načelo delovanja krmilnega sistema
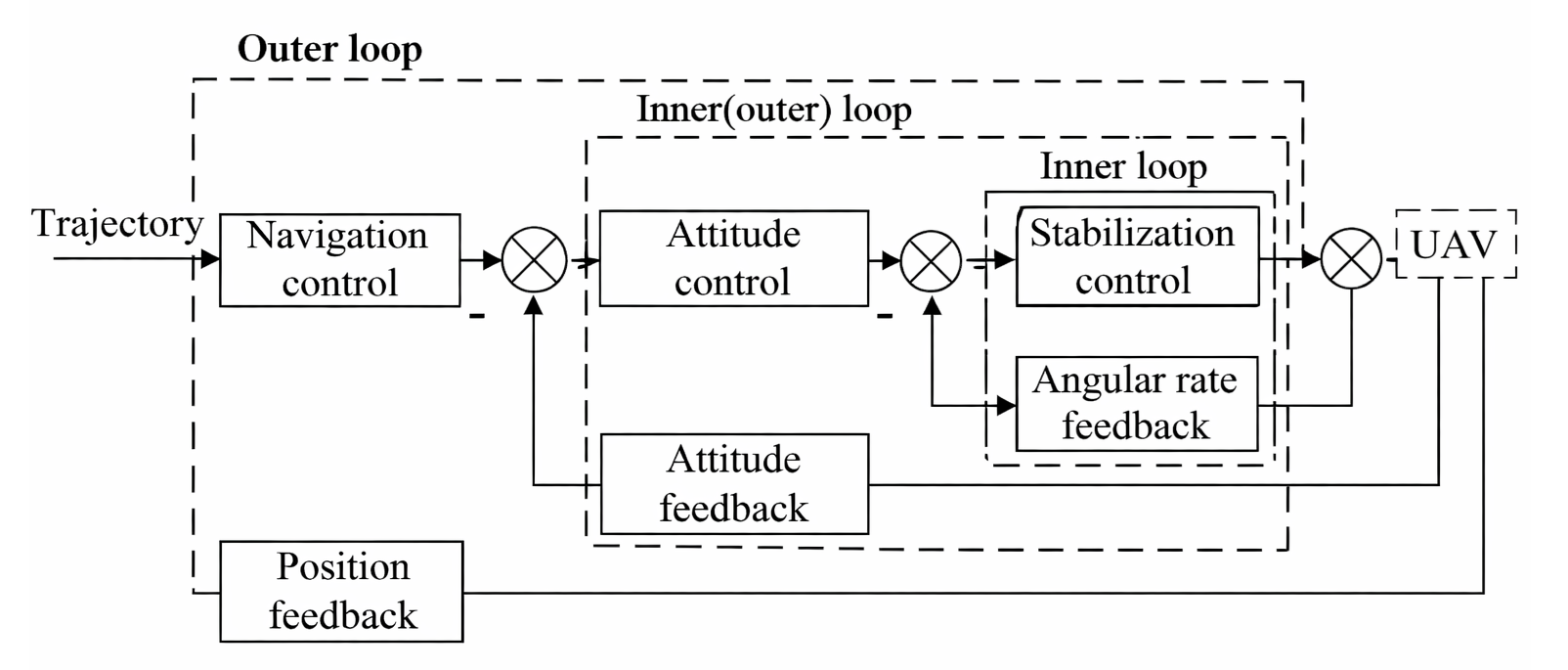
Slika 3. Načelo delovanja krmilnega sistema
Načelo delovanja krmilnega sistema se začne z dajanjem želene vhodne vrednosti sistemu.Sistem nato to vrednost primerja z dejansko izhodno vrednostjo.Razlika med njima se imenuje signal napake.Če napaka obstaja, sistem ustvari signal popravka.Ta popravek prilagodi postopek za zmanjšanje napake.Izhod se spremeni in se nenehno znova preverja.Cikel se ponavlja, dokler se rezultat ne ujema z želeno vrednostjo.
Značilnosti krmilnih sistemov
Nadzorni sistemi se ocenjujejo glede na to, kako dobro delujejo med delovanjem.Te značilnosti opisujejo kakovost in zanesljivost odziva sistema.
|
Značilnosti |
Opis |
|
Stabilnost |
Izhod ne
ne razhajajo se;se po motnji vrne na enakomerno vrednost |
|
Natančnost |
Končna napaka ≤
±2–5 % nastavljene vrednosti |
|
Natančnost |
Izhod
variacija ≤ ±1 % pri istem vnosu |
|
Odzivni čas
|
Začetna
reakcija se pojavi v izmerjenem zakasnitvenem času (td) |
|
Čas vzpona |
Čas od 10%
do 90 % končne vrednosti |
|
Čas poravnave |
Vstopi in
ostane v območju ±2 % |
|
Prekoračitev |
Peak preseže
končna vrednost po % zneska |
|
Stabilno stanje
Napaka |
Konstanta
zamik, ki ostane po stabilizaciji |
|
Občutljivost |
Δizhod /
ΔRazmerje spreminjanja parametrov |
|
Robustnost |
Vzdržuje
delovanje kljub spremembi motnje |
|
Pasovna širina |
Deluje
učinkovito do mejne frekvence –3 dB |
|
Ponovljivost |
Isti vnos
proizvede enak izhod znotraj tolerance |
|
Zanesljivost |
Deluje
brez napak za nazivni čas delovanja (MTBF) |
|
Dušenje |
Nihanje
upad, določen z razmerjem dušenja ζ |
|
Hitrost od
Odziv |
Skupni čas do
doseči stabilno stanje |
Vrste nadzornih sistemov
Nadzorni sistemi so razvrščeni glede na to, kako ravnajo z informacijami, signali in odzivnim vedenjem.Razvrščeni so v skupine glede na uporabo povratne informacije, obliko signala in matematično obnašanje.
Regulacijski sistem z odprto zanko
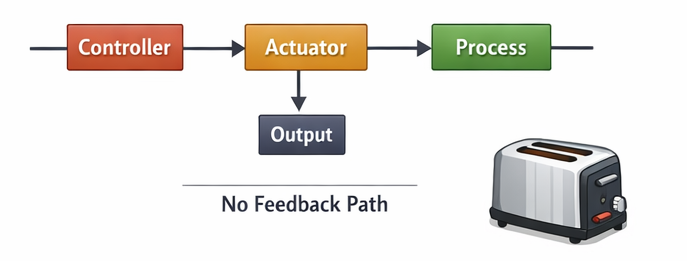
Slika 4. Diagram krmilnega sistema odprte zanke
Regulacijski sistem z odprto zanko je sistem, kjer izhod ne vpliva na krmiljenje.Sistem pošlje ukaz in domneva, da je rezultat pravilen, ne da bi ga preveril.Ker ni poti povratne informacije, ne more samodejno odpraviti napak ali motenj.Delovanje je odvisno predvsem od pravilne kalibracije in delovnih pogojev.Ti sistemi so preprosti, poceni in enostavni za načrtovanje.Vendar lahko spremembe obremenitve ali okolja vplivajo na končni rezultat.Pogosti primeri vključujejo časovnik električnega opekača kruha, nadzor časovnika pralnega stroja in fiksni časovnik namakanja.
Krmilni sistem zaprtega kroga
Slika 5. Diagram krmilnega sistema z zaprto zanko
Krmilni sistem z zaprto zanko je sistem, ki uporablja povratne informacije za samodejno prilagajanje izhoda.Sistem izmeri rezultat in ga primerja z želeno vrednostjo.Če se pojavi razlika, se uporabi popravek za zmanjšanje napake.To neprekinjeno prilagajanje omogoča natančno in stabilno delovanje tudi v spremenljivih pogojih.Sistemi z zaprto zanko zagotavljajo boljšo natančnost in zanesljivost kot sistemi z odprto zanko.Široko se uporabljajo v sodobnih aplikacijah za avtomatsko krmiljenje.Tipični primeri vključujejo nadzor temperature klimatske naprave, tempomat vozila in samodejne regulatorje napetosti.
Sistem neprekinjenega nadzora
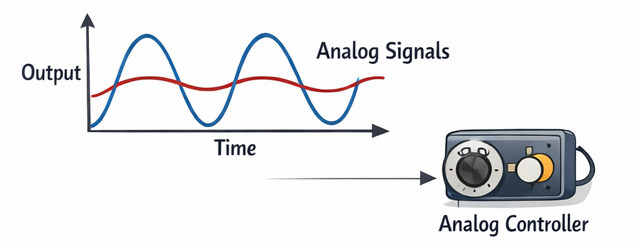
Slika 6. Zvezni (analogni) kontrolni signal
Sistem neprekinjenega nadzora obdeluje signale, ki se skozi čas gladko spreminjajo.Vhod in izhod obstajata v vsakem trenutku brez prekinitve.Ti sistemi običajno delujejo z analognimi električnimi ali mehanskimi signali.Ker so signali neprekinjeni, je tudi odziv gladek in naraven.Sisteme z zveznim časom običajno najdemo v tradicionalnih analognih krmilnikih.Primerni so za fizične procese, ki zahtevajo takojšnjo reakcijo.Primeri vključujejo analogne regulatorje hitrosti, nadzor glasnosti zvočnega ojačevalnika in nadzor položaja hidravličnega ventila.
Sistem nadzora z diskretnim časom
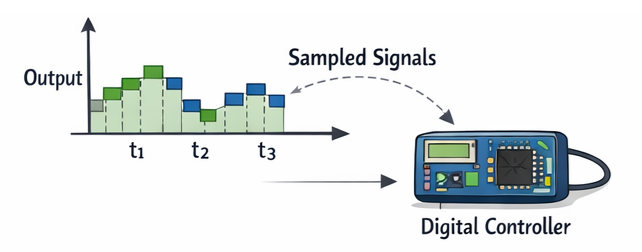
Slika 7. Diskretni (digitalni) krmilni signal
Sistem nadzora z diskretnim časom deluje z uporabo vzorčenih podatkovnih signalov.Sistem preverja in posodablja vrednosti samo v določenih časovnih intervalih.Te signale običajno obdelujejo digitalni krmilniki ali mikroprocesorji.Rezultat se spreminja korak za korakom in ne neprekinjeno.Takšni sistemi omogočajo programabilno delovanje in prilagodljivo prilagajanje.Široko se uporabljajo v sodobnem elektronskem in računalniškem krmiljenju.Primeri vključujejo nadzor temperature na osnovi mikrokrmilnika, digitalni nadzor hitrosti motorja in termostate pametnega doma.
Linearni nadzorni sistem
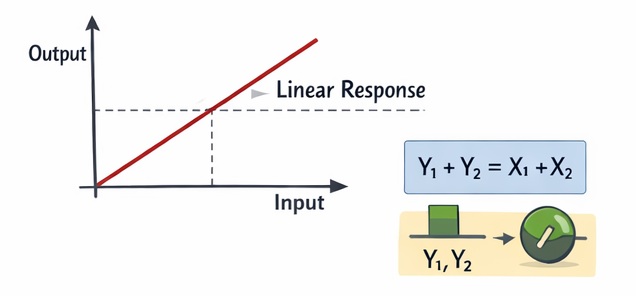
Slika 8. Vhodno-izhodno razmerje linearnega sistema
Linearni krmilni sistem sledi sorazmernemu razmerju med vhodom in izhodom.Če se vložek podvoji, se podvoji tudi izhod pod enakimi pogoji.Ti sistemi izpolnjujejo načelo superpozicije, kjer kombinirani vhodi proizvajajo kombinirane izhode.Linearno vedenje omogoča predvidljivo in enostavno matematično analizo.Večina teoretičnih krmilnih načrtov zaradi enostavnosti predvideva linearno delovanje.Linearni modeli pomagajo pri načrtovanju stabilnih in natančnih sistemov.Primeri vključujejo elektronske ojačevalnike majhnega signala in območja za krmiljenje motorja z nizko obremenitvijo.
Nelinearni krmilni sistem
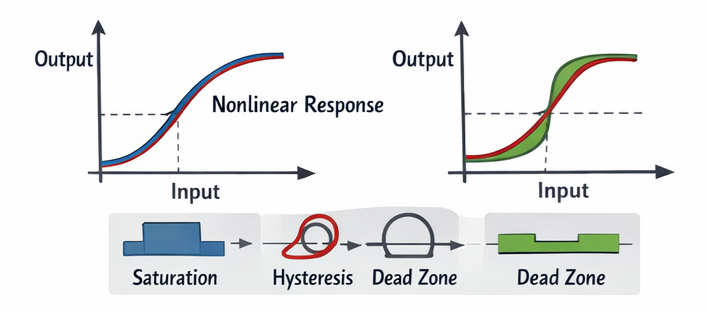
Slika 9. Karakteristike odziva nelinearnega sistema
Nelinearni krmilni sistem ima izhod, ki ni sorazmeren z vhodom.Odziv se spreminja glede na območje delovanja ali pogoje.Majhne vhodne spremembe lahko povzročijo velike izhodne variacije ali pa sploh ne pride do spremembe.Pogosto se pojavijo učinki, kot so nasičenost, histereza in mrtve cone.Te sisteme je težje analizirati, vendar bolj natančno predstavljajo fizične procese.Mnogi sistemi se naravno obnašajo nelinearno.Primeri vključujejo omejitve gibanja robotske roke, obnašanje magnetnega aktuatorja in nadzor pretoka ventila v skrajnih položajih.
Prednosti in slabosti nadzornih sistemov
Nadzorni sistemi izboljšujejo doslednost in zmanjšujejo ročni napor, hkrati pa uvajajo kompleksnost in stroške.
Prednosti nadzornih sistemov
• Sistem med delovanjem ohranja izhod blizu zahtevane vrednosti.
• Operaterjem ni treba ročno nastavljati opreme.
• Stroji lahko delujejo dolge ure brez pogostih ustavitev.
• Sistem samodejno popravlja spremembe pogojev.
• Stanje delovanja je mogoče preveriti s plošče ali oddaljenega zaslona.
Slabosti nadzornih sistemov
• Stroški namestitve so višji od enostavnih ročnih sistemov.
• Za namestitev in servis so potrebni usposobljeni delavci.
• Senzorji in elektronski deli lahko sčasoma odpovejo.
• Iskanje vzroka težav lahko traja dlje.
• Sistem je odvisen od stabilne električne energije.
Uporaba nadzornih sistemov
Nadzorni sistemi se uporabljajo v industrijski avtomatizaciji in vsakodnevni opremi za samodejno vzdrževanje pravilnega delovanja.
1. Industrijska proizvodnja
Proizvodni stroji ohranjajo dosledne dimenzije in kakovost izdelkov.Avtomatizirane montažne linije uporabljajo regulacijo za zagotavljanje ponovljivosti.To zmanjša količino odpadkov in izboljša učinkovitost.
2. Regulacija temperature
Oprema za ogrevanje in hlajenje ohranja udobne okoljske pogoje.Zgradbe se zanašajo na samodejno prilagajanje za stabilizacijo notranje klime.To izboljša energetsko učinkovitost in udobje.
3. Transportni sistemi
Vozila uporabljajo nadzor hitrosti in stabilnosti za bolj gladko delovanje.Sodobni avtomobili vključujejo tempomat in sisteme vleke.Ti izboljšajo varnost in zmogljivost vožnje.
4. Napajalni sistemi
Električna omrežja uravnavajo nivoje napetosti in frekvence.Generatorji prilagodijo izhod, da ustrezajo povpraševanju po obremenitvi.To zagotavlja stabilno oskrbo z električno energijo.
5. Robotika in avtomatizacija
Roboti izvajajo naloge natančnega pozicioniranja in gibanja.Avtomatizirani stroji delujejo neprekinjeno z visoko natančnostjo.To omogoča napredno proizvodnjo.
6. Medicinska oprema
Naprave vzdržujejo nadzorovane pogoje delovanja med zdravljenjem.Oprema za spremljanje ohranja vrednosti v varnih mejah.To izboljša varnost in zanesljivost pacientov.
7. Gospodinjski aparati
Vsakodnevne naprave samodejno upravljajo nastavitve delovanja.Pralni stroji in hladilniki vzdržujejo pravilne pogoje delovanja.To poenostavlja vsakodnevna opravila.
8. Aerospace Systems
Letala in brezpilotna letala vzdržujejo stabilne pogoje letenja.Samodejno vodenje ohranja pravilno orientacijo in nadmorsko višino.To podpira zanesljivo navigacijo.
Nadzorni sistem proti avtomatizaciji proti vgrajenim sistemom
Te tehnologije so tesno povezane, vendar služijo različnim inženirskim namenom znotraj sodobnih elektronskih in industrijskih izdelkov.
|
Funkcija |
Nadzor
Sistem |
Avtomatizacija |
Vdelano
Sistem |
|
Glavni fokus |
Uredba o
spremenljivke |
Proces
izvedba |
Naprava
delovanje |
|
Namen |
Vzdrževanje
želeno vrednost |
Opravljajte naloge
samodejno |
Teči predano
funkcije |
|
Področje uporabe |
Specifično
procesno vedenje |
Celotno
potek dela
|
Samski
napravo izdelka |
|
Odločitev
Zmogljivost |
Na podlagi
izmerjene vrednosti |
Na podlagi
programirano logiko |
Na podlagi
vdelana programska oprema |
|
Povratne informacije Uporaba |
pogosto
potrebno |
Neobvezno |
Neobvezno |
|
Vrsta strojne opreme |
Senzorji in
aktuatorji |
Stroji in
krmilniki |
Mikrokrmilnik
tabla |
|
Vloga programske opreme |
Izračun
in popravek |
Zaporedje
in koordinacijo |
Naprava
krmilna logika |
|
Vrsta odziva |
Neprekinjeno
prilagajanje |
Naloga
izvedba |
Funkcionalno delovanje |
|
Velikost sistema |
Majhna do
srednje |
Srednje do
velik |
Zelo majhen |
|
Prilagodljivost |
Zmerno |
visoko |
Omejeno |
|
Čas
Zahteva |
visoko |
Zmerno |
visoko |
|
Aplikacija
Raven |
Raven procesa |
Raven obrata |
Raven izdelka |
|
Primer |
Temperatura
nadzor |
Tovarna
proizvodna linija |
Pametna ura |
|
Integracija |
del
avtomatizacija |
Vsebuje
nadzorni sistemi |
Podpira oboje |
Zaključek
Nadzorni sistemi ohranjajo stabilnost z neprekinjenim primerjanjem dejanskega izhoda s ciljno vrednostjo in popravljanjem morebitnih napak.Njihovo delovanje je odvisno od ključnih elementov, kot so povratne informacije, delovanje krmilnika in nadzorovan proces.Različne klasifikacije določajo, kako se obravnavajo signali in kako natančno se sistem odziva na motnje.Zaradi teh zmogljivosti se nadzorni sistemi pogosto uporabljajo v industriji, transportu, energetiki, medicinskih napravah in vsakodnevni opremi.
O nas
ALLELCO LIMITED
Preberi več
Hitro povpraševanje
Prosimo, pošljite poizvedbo, takoj bomo odgovorili.
Pogosto zastavljena vprašanja [FAQ]
1. Kakšna je razlika med krmilnikom in krmilnim sistemom?
Krmilnik je le naprava za sprejemanje odločitev (na primer PLC ali PID krmilnik).Krmilni sistem vključuje krmilnik plus senzorje, aktuatorje in proces, ki se regulira.
2. Kaj je PID regulacija in zakaj je pomembna?
PID krmiljenje uporablja proporcionalna, integralna in izvedena dejanja za hitro in gladko zmanjšanje napake.Izboljša stabilnost, natančnost in hitrost odziva v večini industrijskih sistemov.
3. Zakaj nadzorni sistemi včasih nihajo ali lovijo?
Nihanje se pojavi, ko so popravki preveč agresivni ali zakasnjeni.Slaba nastavitev, počasna tipala ali pretirano ojačenje povzročijo, da se izhodni signal večkrat preseže.
4. Kaj je nasičenost aktuatorja?
Zasičenost aktuatorja se zgodi, ko aktuator doseže svojo fizično mejo in ne more več povečati izhoda.To sistemu prepreči popravljanje večjih napak.
5. Kako nadzorni sistemi obravnavajo zamude v procesih?
Uporabljajo metode uglaševanja, filtre ali napovedne algoritme za kompenzacijo zamika, tako da se popravek izvede ob pravem času.

Vodnik po uporih 4,7 kΩ: koda barv, uporaba, testiranje in primerjava vrednosti
na 2026/02/16

Miniaturni odklopnik (MCB): princip delovanja, vrste, ocene in vodnik za izbiro
na 2026/02/15
Priljubljene objave
-

Kompleksni nastavitveni računalniki: Kako so spremenili računalništvo?
na 8000/04/18 147776
-

USB-C pinout in funkcije
na 2000/04/18 112022
-
Uporaba Xilinx Unified Simulacijske primitive: Obsežen vodnik za oblikovanje in simulacijo FPGA
na 1600/04/18 111351
-
Napajalne napetosti v elektroniki: pomen VCC, VDD, VEE, VSS in GND
na 0400/04/18 83777
-

Vodnik priključkov RJ45: pinout, ožičenje, vrste kablov in uporabe
na 1970/01/1 79575
-

Ultimate Guide za žičnice barvnih kod v sodobnih električnih sistemih
Način, kako naši električni sistemi uporabljajo barve, ni samo za videz.Vsaka barva žice zdaj označuje določeno funkcijo, kar olajša pravilno prepoznavanje in ravnanje z električnimi komponentami m...na 1970/01/1 66964
-

Vodnik za čiščenje ventila: funkcija, simptomi, testiranje in zamenjava za optimalno delovanje motorja
Čistilni ventil je ključni del sistema avtomobila, ki pomaga ohranjati čist zrak z upravljanjem hlapov goriva, preden lahko pobegnejo v ozračje.To ne samo pomaga okolju z zmanjšanjem onesnaževanja,...na 1970/01/1 63104
-

Faktor kakovosti (q): enačbe in aplikacije
Faktor kakovosti ali "Q" je pomemben pri preverjanju, kako dobro induktorji in resonatorji delujejo v elektronskih sistemih, ki uporabljajo radijske frekvence (RF).'Q' meri, kako dobro vezje minimi...na 1970/01/1 63041
-
Doseganje največjih zmogljivosti z največjim teoremom o prenosu energije
Teorem največjega prenosa moči pojasnjuje, kako energija iz vira, na primer baterija ali generator, teče v povezano obremenitev.Prikaže natančen pogoj, kjer obremenitev prejme največ moči.Ta članek...na 1970/01/1 54097
-

A23 Specifikacije baterije in združljivost
Akumulator A23 je majhna baterija v obliki valja z visoko napetostjo.Imenovan tudi 23A, 23AE ali MN21, deluje pri 12 voltih in veliko višji od baterij AA ali AAA.Njegova posebna zasnova je...na 1970/01/1 52189
Vroča številka dela
-

MMBD4148TW-7-F
Diodes Incorporated
DIODE ARRAY GP 75V 150MA SOT363
NCP706MX22TAG
onsemi
IC REG LINEAR 2.2V 1A 8XDFN
EMK105BJ473MV-F
Taiyo Yuden
CAP CER 0.047UF 16V X5R 0402
LPC4337JBD144E
NXP USA Inc.
IC MCU 32BIT 1MB FLASH 144LQFP
P2106UALRP
Littelfuse Inc.
THYRISTOR 170V 150A 6SMD GW
ADNS-5030
Broadcom Limited
SENSOR OPTICAL MOUSE 8-DIP
CSD18541F5T
Texas Instruments
MOSFET N-CH 60V 2.2A 3PICOSTAR
ATH016A0X43-SR
ABB Power Electronics Inc.
DC DC CONVERTER 0.8-3.6V 58W
AT29LV1024-15TC
Microchip Technology
IC FLASH 1MBIT PARALLEL 48TSOP
TLC252BCDR
Texas Instruments
IC CMOS 2 CIRCUIT 8SOIC
CD4024BCM
onsemi
IC BINARY COUNTER 7-BIT 14SOIC
TIP121
Fairchild Semiconductor
TRANS NPN DARL 80V 5A TO220AB
MC33GD3000EPR2
NXP USA Inc.
IC MOTOR DRIVER 6V-58V 56QFN
MX7581LN+
Analog Devices Inc./Maxim Integrated
IC DAS 8BIT 15K 28DIP
SP339BER1-L/TR
MaxLinear, Inc.
IC TXRX FULL/HALF 3/5 40QFN
SN74368AN
Texas Instruments
IC 6-BIT BUFFER/LINE DRVR 16-DIP
LTC2600CGN#PBF
Analog Devices Inc.
IC DAC 16BIT V-OUT 16SSOP
TPS62356YZGR
Texas Instruments
IC REG BUCK ADJ/PROG 1A 12DSBGA -

MAX1805MEE
Analog Devices Inc./Maxim Integrated
IC TEMP SENSOR MULTI-CHAN 16QSOP
FAR-F6KB-1G9600-B4GP-Z
Taiyo Yuden
FILTER SAW 1.96GHZ 5SMD
PZM5.1NB2,115
NXP USA Inc.
DIODE ZENER 5.1V 300MW SMT3
12101U1R3BAT2A
KYOCERA AVX
CAP CER 1.3PF 100V NP0 1210
TSC2300IPAG
Texas Instruments
IC SCREEN CNTRL 12BIT 64TQFP
LCMXO1200C-4FTN256I
Lattice Semiconductor Corporation
IC FPGA 211 I/O 256FTBGA
BZM55B27-TR
Vishay General Semiconductor - Diodes Division
DIODE ZENER 27V 500MW MICROMELF
SMBJ13CA
Littelfuse Inc.
TVS DIODE 13VWM 21.5VC DO214AA
ESD7351HT1G
onsemi
TVS DIODE 3.3VWM SOD323
IMC1210ER2R2J
Vishay Dale
FIXED IND 2.2UH 320MA 1 OHM SMD
PIC16C620A-04I/SO
Microchip Technology
IC MCU 8BIT 896B OTP 18SOIC
TPS7A2045PDQNR
Texas Instruments
300-MA, ULTRA-LOW-NOISE, LOW-IQ,
TPIC6595DWRG4
Texas Instruments
IC PWR 8-BIT SHIFT REGIS 20-SOIC
UA78L08CD
Texas Instruments
IC REG LINEAR 8V 100MA 8SOIC
ADA4431-1YCPZ-RL
Analog Devices Inc.
IC AMP FILTER 16LFCSP
SN74HC574DW
Texas Instruments
IC FF D-TYPE SNGL 8BIT 20SOIC
BLF2012LL98R2400A
Pulse Electronics
FILTER BALANCED BALUN WLAN
SLW20R-1C7LF
Amphenol ICC (FCI)
CONN FFC FPC BOTTOM 20POS 1MM RA -

1SMB30CAT3G
Littelfuse Inc.
TVS DIODE 30VWM 48.4VC SMB
LTC2907ITS8#TRPBF
Analog Devices Inc.
IC SUPERVISOR 2 CHANNEL TSOT23-8
M27C512-15F6
STMicroelectronics
IC EPROM 512KBIT PARALLEL 28CDIP
MMSZ5227B-7-F
Diodes Incorporated
DIODE ZENER 3.6V 500MW SOD123
AT27C010-70JI
Microchip Technology
IC EPROM 1MBIT PARALLEL 32PLCC
0157010.DR
Littelfuse Inc.
FUSE BRD MNT 10A 125VAC/VDC SMD
0603YG105ZAT4A
KYOCERA AVX
CAP CER 1UF 16V Y5V 0603
ST72F63BE2M1
STMicroelectronics
IC MCU 8BIT 8KB FLASH 24SOIC
5SGXMABK2H40I2N
Intel
IC FPGA 696 I/O 1517HBGA
NCP698SQ25T1G
onsemi
IC REG LINEAR 2.5V 150MA SC82AB
HUF75623P3
Fairchild Semiconductor
MOSFET N-CH 100V 22A TO220-3
AD5541JRZ-REEL7
Analog Devices Inc.
IC DAC 16BIT V-OUT 8SOIC
CSBFB700KJ58-R1
Murata Electronics
CER RESONATOR SMD
QMK212B7222KD-T
Taiyo Yuden
CAP CER 2200PF 250V X7R 0805
FIN1027M
Fairchild Semiconductor
IC DRIVER HALF 2/0 8SOIC
MIC4690YM
Microchip Technology
IC REG BUCK ADJUSTABLE 1A 8SOIC
GRM2165C2A751JA01D
Murata Electronics
CAP CER 750PF 100V C0G/NP0 0805
UPD720200F1-DAK-A
Renesas Electronics America Inc
USB 3.0 HOST CONTROLLER V